 |
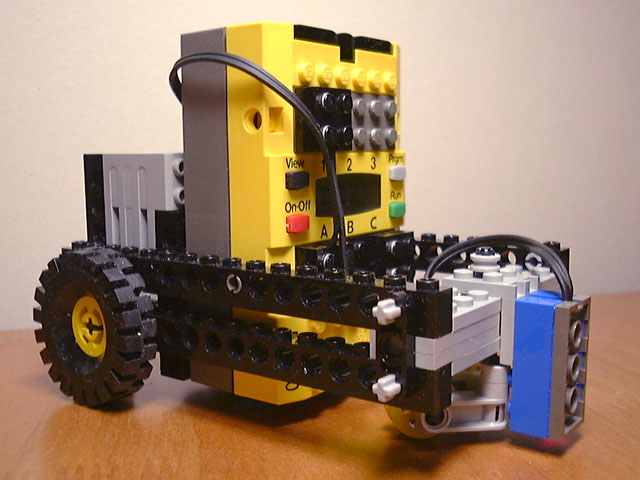
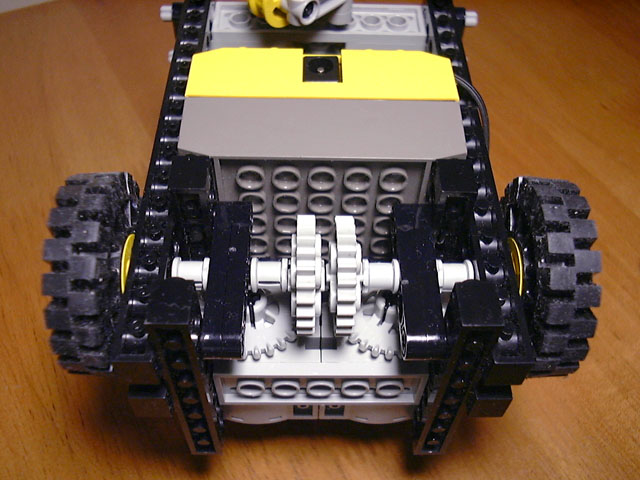
MindStorms情報局主催のお気軽コンテスト・タイムトライアルに参加するために作ったロボットです。
|
| W140D140H100 |
|
99-3-25
|
|
ごくシンプルにテストパッドをぐるぐる回ります。 34.9秒で10周することができます。 |
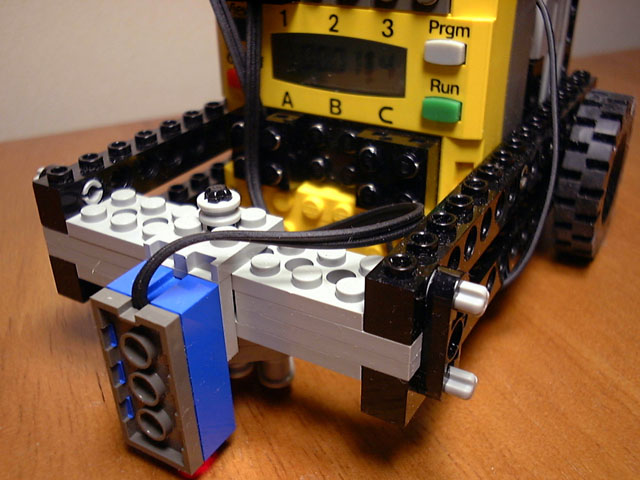
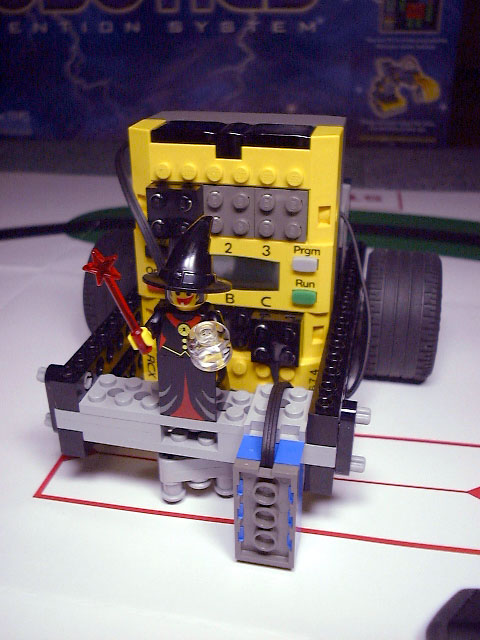
動画「風になれ1号」(mpeg 305k) ゲートには紅茶の缶を使用しました |

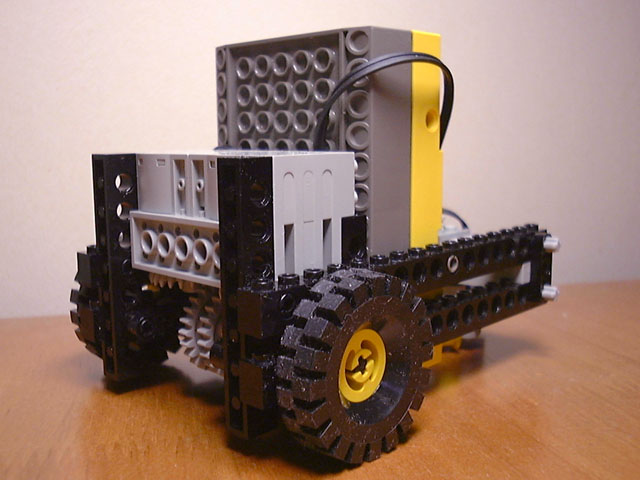
| W103D140H100 |
|
99-3-28
|
|
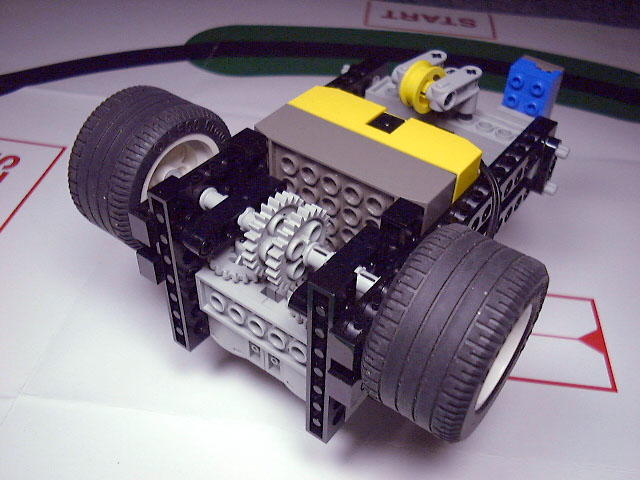
このロボットはお気軽コンテスト未参加作品です。 しかし、 シンプルで強固なフレーム構造、シンメトリーで優美なフォルムなど、 右回り左回りとも28.5秒で10周できます。
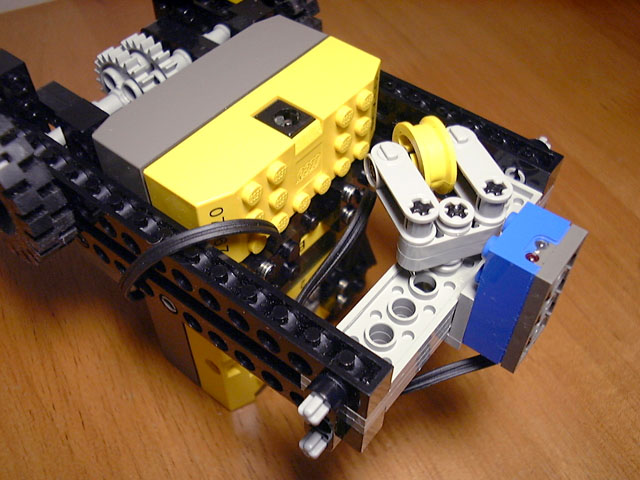
で、1号機と何が違うかって? センサーの位置が中央になりました。 それ以外は...プログラムの他はまったく同じです。 |
動画「風になれ2号」(mpeg 233k) |